TextDeformer Paper
TextDeformer Paper
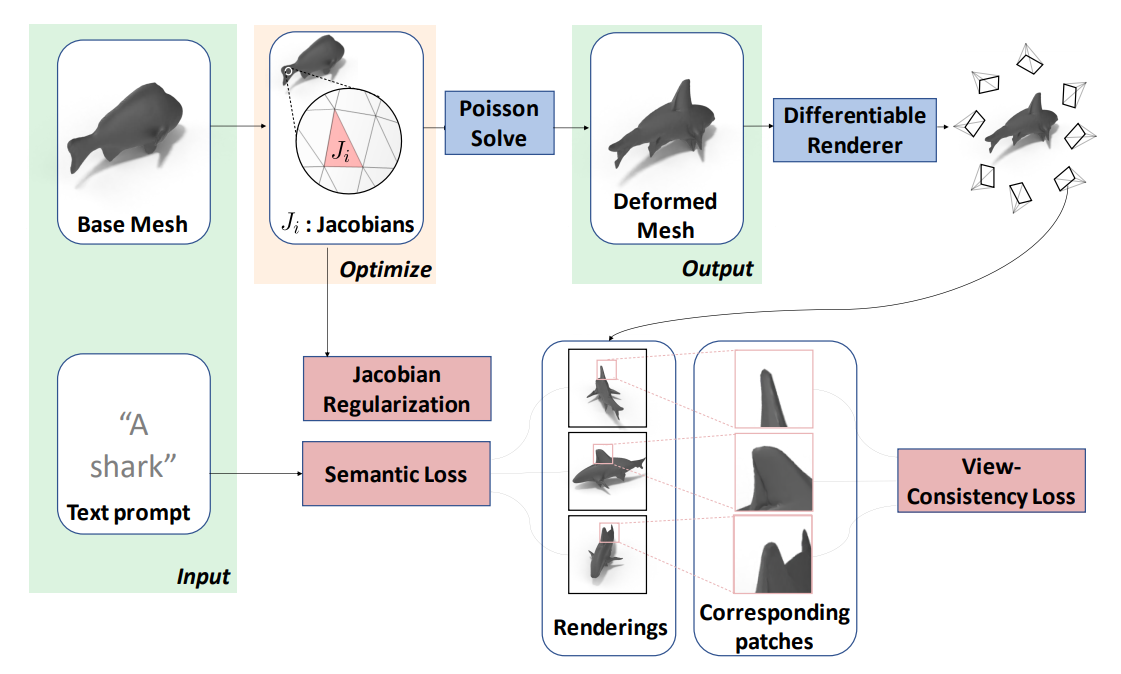
Overview of the Process
- Given Pre-triangle Jacobians (Identity Initialized)
- Jacobian Regularization loss
- Compute deformed mesh by solving Poisson Equation
- Render though differentiable renderer
- Passing render image to CLIP
- View Consistency loss
- Semantic loss
Jacobians Described Transform and Poisson Equation
for a vector function $\vec{f}(u,v)$, the Jacobian is defined as \(J = \vec{f}(u,v) \nabla^{T}_{uv} = \begin{bmatrix} \partial f_x/\partial u & \partial f_x/\partial v\\ \partial f_y/\partial u & \partial f_y/\partial v\\ \partial f_z/\partial u & \partial f_z/\partial v\\ \end{bmatrix}\)
Jacobians describe the local linear transform of the non-linear transform
Jacobians separately transform Every Triangle, and is the source parameters for optimization
Solving Poisson Equation to restrict the mapping
$\Phi$ is the transform described by vertex offset
the minimum target is
\[\Phi^* = \min_{\phi}\sum_{f_i\in F} |f_i|\| \nabla_i(\Phi)-J_i \|_2^2\]| the $ | f_i | $ is the area of the triangle, which is the weight term |
$| \nabla_i(\Phi)-J_i |_2^2$ describes the match between pre-vertex transform and pre pre-triangle transform
this can be compute by solving the poisson equation
the predicting pre-triangle transform comes from
Neural Jacobian Fields: Learning Intrinsic Mappings of Arbitrary Meshes
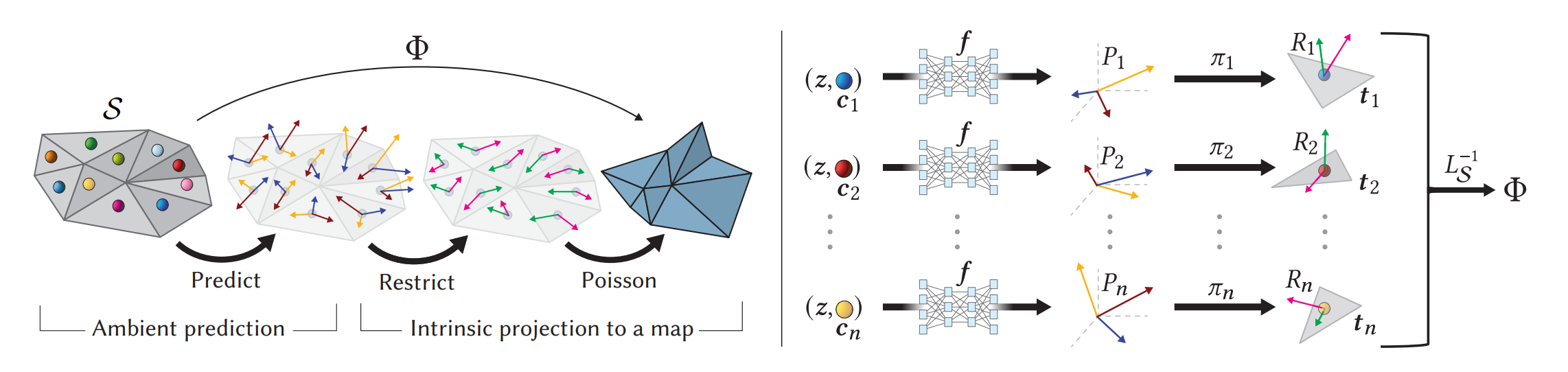
which first given the predicting pre-triangle transform prediction then solving restriction to generate an acceptable mapping
in the Text Deformer author simplify this using only the pre-triangle transform (Jacobian) as the optimization parameter
The poisson method is firstly being used in
Poisson Image Editing (SIGGRAPH 2004)

the goal is to minimize
\[\min_f \iint_{\Omega} \|\nabla f - v\|^2 \quad with \quad f|_{\partial \Omega} = f^*|_{\partial \Omega}\]this yields the poisson equation
\[\Delta f = \nabla \cdot v \quad over \quad \Omega \quad with \quad f|_{\partial \Omega} = f^*|_{\partial \Omega}\]to solve this equation, we need to encode the pixel value into a vector
to be specific $f$ is a $n \times c$ matrix, where $n$ is the number of pixel to be solved and $c$ is the number of channel
the discrete Laplacian operator on image is a convolution kernel
\[\begin{bmatrix} 0 & 1 & 0\\ 1 & -4 & 1\\ 0 & 1 & 0 \end{bmatrix}\]and can be encode into a matrix $L$ which is a $n \times n$ matrix that
\[L_{ij} = \begin{cases} -4 & i = j\\ 1 & i \in N(j)\\ 0 & otherwise \end{cases}\] \[(L)_{1} = \begin{bmatrix} -4 & ... & 1 & ...& 1 & ...& 1 &...& 1 & ... \\ \end{bmatrix}\]thus the poisson equation can be sovled as a linear system
\[L f = \nabla \cdot v\]\[\textbf{w} = \nabla \phi + \nabla \times v + \textbf{h}\]
Mesh Editing with Poisson-Based Gradient Field Manipulation (Siggraph 2004)The Poisson equation is closely related to Helmholtz-Hodge vector field decomposition [Abrahamet al. 1988] which uniquely exists for a smooth 3D vector field wdefined in a region Ω:
The scalar potential field φ from this decomposition happens to be the solution of the following least-squares minimization
\[\min_{\phi} \iint_{\Omega} \|\nabla \phi - w\|^2 dA\]whose solution can also be obtained by solving a Poisson equation,
\[\Delta \phi = \nabla \cdot w\]
Helmholtz-Hodge Decomposition from Discrete Differential Geometry: An Applied Introduction
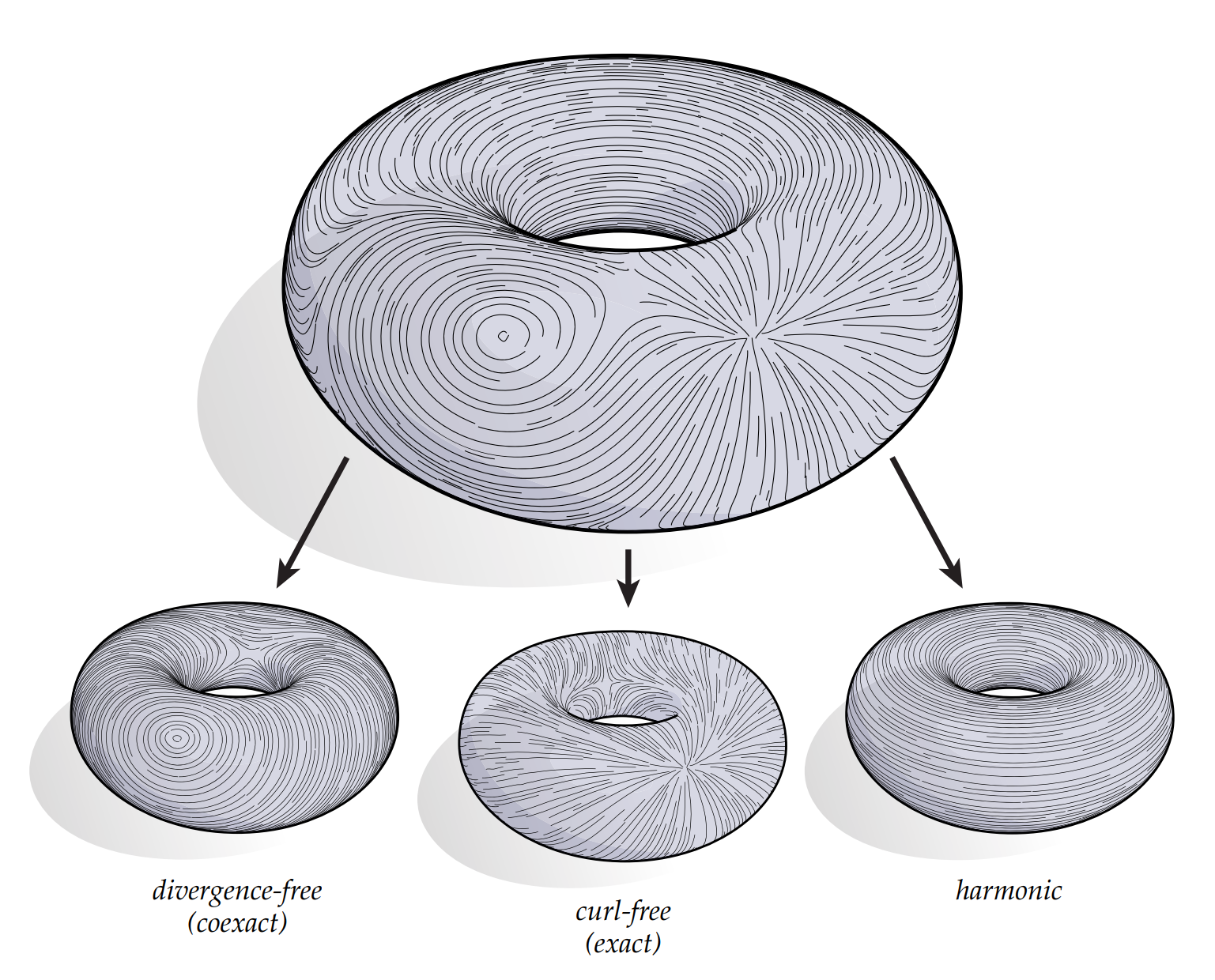
least-squares minimization can be explained as finding a the potential field $\phi$ that minimize the difference between the gradient of $\phi$ (which is curl-free) and the vector field $w$, thus minimize the curl-free part of $w$, yielding a curl-free vector field
this is same as solving the Poisson equation which is obtained by diverging the vector field $w$ to cancel out the $\nabla \times v $ and $ \textbf{h}$ term
Solving Poisson Equation On Mesh
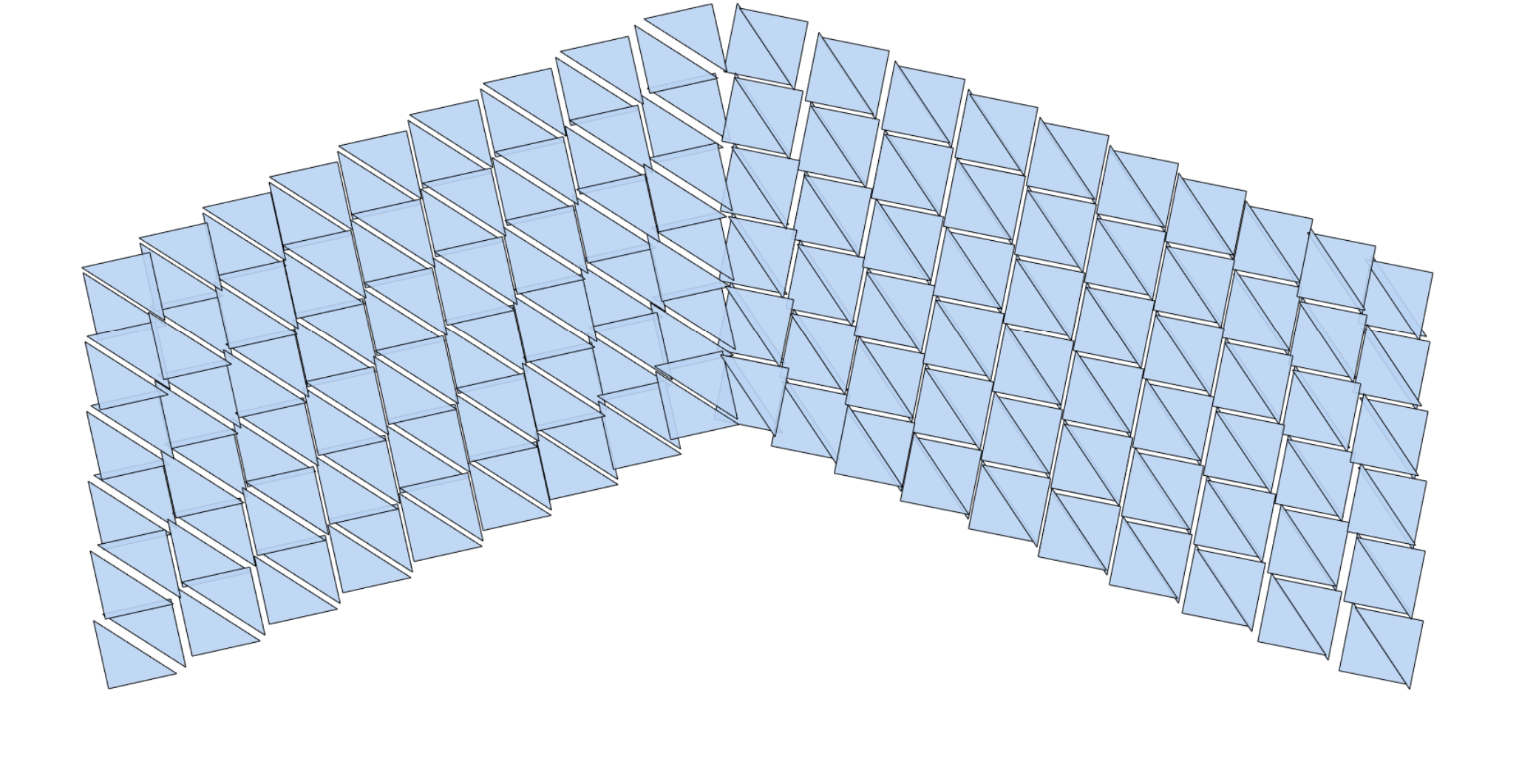
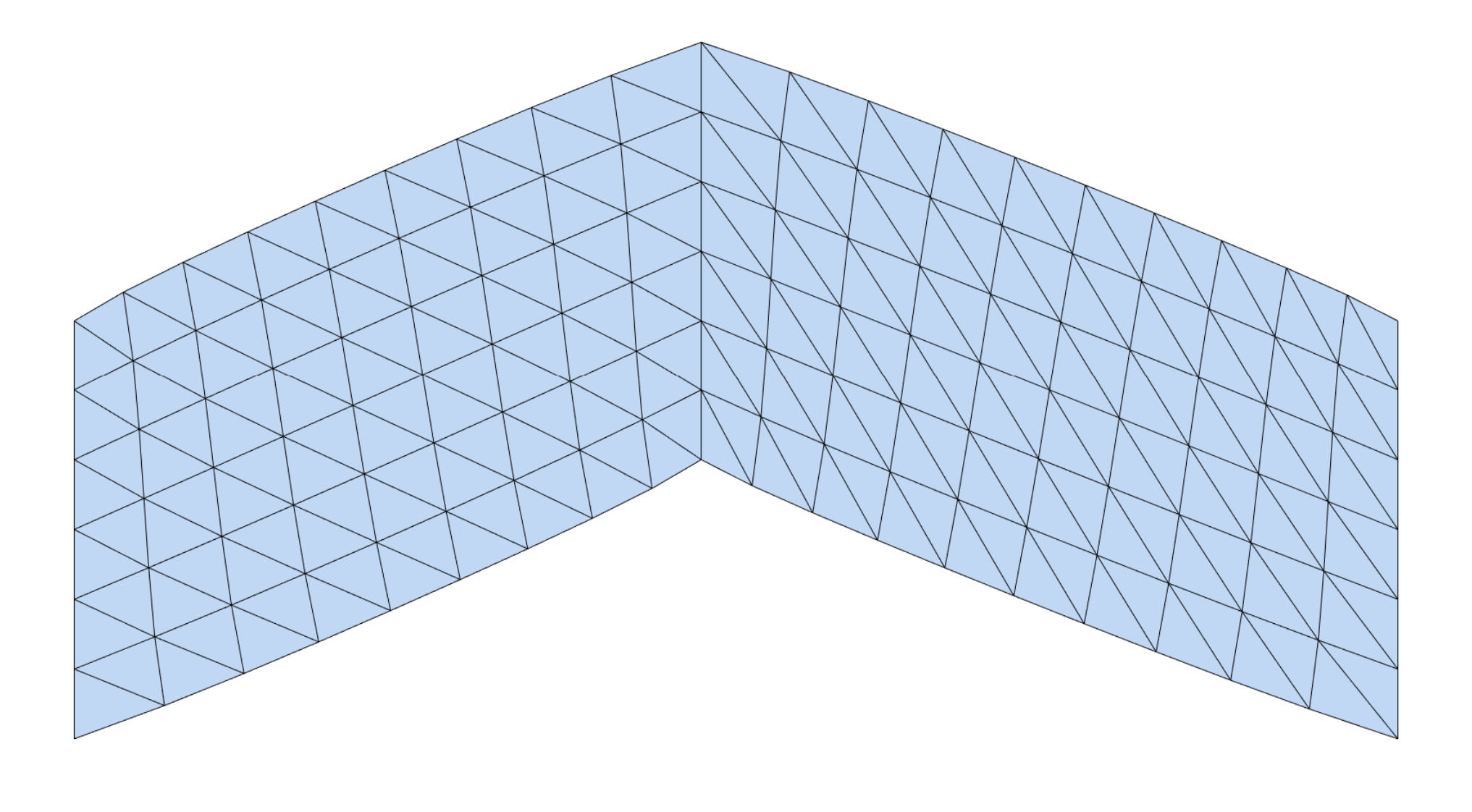
the discrete function on mesh is the sum of weighted basis function $\phi_i$ at each vertex $i$
the basis function $\phi_i$ is show as below, which is a hat function that value 1 at vertex $i$ and 0 at other vertex
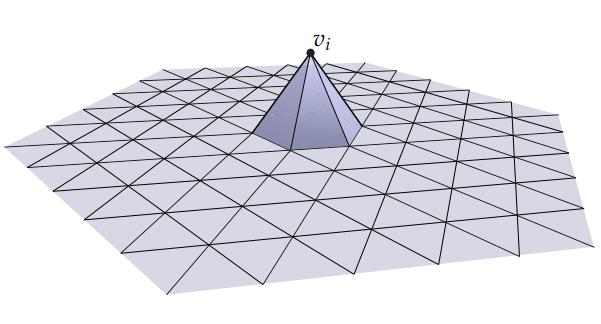
thus a discrete function $f$ can be written as
\[f = \sum_{i=1}^n f_i \phi_i\]the concept of point-wise and piece-wise:
- point-wise: the function value is defined at every point
- piece-wise: the function value is defined at every piece(triangle)
next we need to talk about the gradient on mesh
as the basis function is a hat function, the gradient of the basis function is a constant vector, thus the gradient operator is a linear operator that transform point-wise function to piece-wise function
the gradient operator is defined as
\(\nabla f = \sum_{i=1}^n f_i \nabla \phi_i = G f\) $n$ is the number of vertex and $m$ is the number of triangle assume that $f$ is a scalar function, the f is a $n \times 1$ vector , $G$ is a $mk \times n$ matrix, it transform a point-wise scalar function to a piece-wise vector
to help understand tensor multiplication of $G$ we can view G as a $m \times n$ whitch contains $1 \times k$ matrix, the outer scope of the matrix compute in right to left order and the inner scope of the matrix compute in left to right order
\[G = \begin{bmatrix} \\ \begin{bmatrix} ... & ... \\ \end{bmatrix}_{1 \times k}\\ \\ \end{bmatrix}_{m \times n}\]if $f$ is a vector function, then we have
\[Gf = \begin{bmatrix} \\ \begin{bmatrix} ... & ...\\ \end{bmatrix}_{1 \times k}\\ \\ \end{bmatrix}_{m \times n} \begin{bmatrix} \\ \begin{bmatrix} ... \\ ... \\ ...\\ \end{bmatrix}_{v \times 1}\\ \\ \end{bmatrix}_{n \times 1} = \begin{bmatrix} \\ \begin{bmatrix} ... & ... \\ ... & ... \\ ... & ... \\ \end{bmatrix}_{v \times k}\\ \\ \end{bmatrix}_{m \times 1}\]standard poisson equation is defined as
\[\Delta u = f\]to sovle u we express u as a linear combination of basis function
\[u = \sum_{i=1}^n x_i \phi_i\]the inner product
\[<u,v> = \sum_{i=1}^n u_i v_i\]and for function
\[<u,v> = \int_{\Omega} u v dA\]to solve the poisson equation, we need to find a function $u$ that satisfy
\[<\Delta u - f, \phi_j> = 0\]which means the difference between the Laplacian of $u$ and $f$ is orthogonal to all basis function $\phi_j$, thus minimizing the difference between the Laplacian of $u$ and $f$
this can be written as
\[<\Delta u, \phi_j> = <f, \phi_j>\]for left side, we have
\[\begin{align*} <\Delta u, \phi_j> &= -<\nabla u, \nabla \phi_j>\\ &= -<\nabla (\sum_{i} x_i \phi_i), \nabla \phi_j>\\ &= -\sum_{i} x_i< \nabla \phi_i, \nabla \phi_j>\\ \end{align*}\]define
\[L_{ij} =- < \nabla \phi_i, \nabla \phi_j>\]then
\[<\Delta u, \phi_j> = L\vec{x}\]cotan-Laplace operator
in short, the cotan-Laplace is
\[<\Delta u_i, \phi_j> = \frac{1}{2} \sum_{j \in N(i)} (\cot \alpha_{i} + \cot \beta_{i}) (u_j-u_i)\] \[L_{ij} = \begin{cases} -\frac{1}{2}\sum_{j \in N(i)} (\cot \alpha_{i} + \cot \beta_{i}) & i = j\\ \frac{1}{2}\cot \alpha_{i} + \cot \beta_{i} & i \in N(j)\\ 0 & otherwise \end{cases}\]for right side, we have
\[\begin{align*} <f, \phi_j> &= <\sum_i b_i \phi_i, \phi_j>\\ &= \sum_i b_i <\phi_i, \phi_j> \end{align*}\] \[A_{ij}= <\phi_i, \phi_j>\] \[<f, \phi_j> = M\vec{b}\]$M$ is called the mass matrix, which is a $n \times n$ diagonal matrix
\[M_{ii} = Area(v_i)\]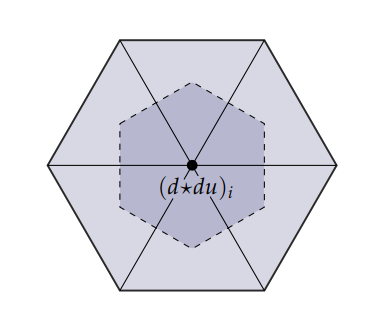
and finally we can solve the poisson equation by solving the linear system
\[L\vec{x} = M\vec{b}\]also express as
\[M^{-1}Lu = f\]this is Laplace-Beltrami(Cotan) Formula
we usually call $M^{-1}L$ as the discrete Laplace-Beltrami operator
the alternative way to compute L is using
\[L = G^T T G\]where $T$ is the per-triangle area matrix or piece-wise mass matrix
to be intuitively understood this we first consider the scaler case
\[\begin{align*} \Delta \phi &= \nabla \cdot \nabla \phi\\ &= \begin{bmatrix}\frac{\partial}{\partial x}& \frac{\partial}{\partial y}& \frac{\partial}{\partial z}\end{bmatrix} \begin{bmatrix} \frac{\partial}{\partial x}\\ \frac{\partial}{\partial y}\\ \frac{\partial}{\partial z}\\ \end{bmatrix} \phi\\ &= \nabla^{T} \nabla \phi \end{align*}\]the G first transform the point-wise function to piece-wise function the $T$ compute the area of each triangle the $G^T$ transform the piece-wise function to point-wise function
\[G = \begin{bmatrix} \\ \begin{bmatrix} ... & ... \\ \end{bmatrix}_{1 \times k}\\ \\ \end{bmatrix}_{m \times n}\qquad G^T = \begin{bmatrix} \\ \begin{bmatrix} ... \\ ... \\ \end{bmatrix}_{1 \times k}\\ \\ \end{bmatrix}_{n \times m}\]as Laplace-Beltrami operator is $M^{-1}L$ bring $L$ into this \(M^{-1}L = M^{-1}G^T T G\)
we can assume that that point-wise mass matrix $M$ and piece-wise mass matrix $T$ cancel out each other leaving only the $G^T G$ which can be view as a $\Delta$
of curse this is only a intuitive explanation, keep in mind that $M^{-1}L$ is the correct way to compute the Laplace-Beltrami operator
\[G^T G \neq M^{-1}L\]back to the original problemm we need to solve
\[\Phi^* = \min_{\phi}\sum_{f_i\in F} |f_i|\| \Phi\nabla_{i}^{T}-J_i \|_2^2\]first convert this into poisson equation
\[\Delta \Phi = \nabla \cdot J\]then using our tool we have
\[M^{-1}L\Phi = G^T J\]computing $L$ can be accelerated by using
\[L = G^T T G\]the mesh vertex transform $\Phi$ can be solved by
\[\Phi = L^{-1}MG^T J\]the $J$ is our source parameter
by passing J through $L^{-1}MG^T$ we can get the vertex transform $\Phi$
$L^{-1}MG^T$ can be view as a Linear Layer in the network which is easy to compute the gradient
Jacobian Regularization loss
\[\mathcal{L}_{I}\left(t_{j}\right)=\alpha \sum_{i=1}^{|\mathcal{F}|}\left\|J_{i}-I\right\|_{2}\]Differential Rendering
Modular Primitives for High-Performance Differentiable Rendering (NVIDIA)
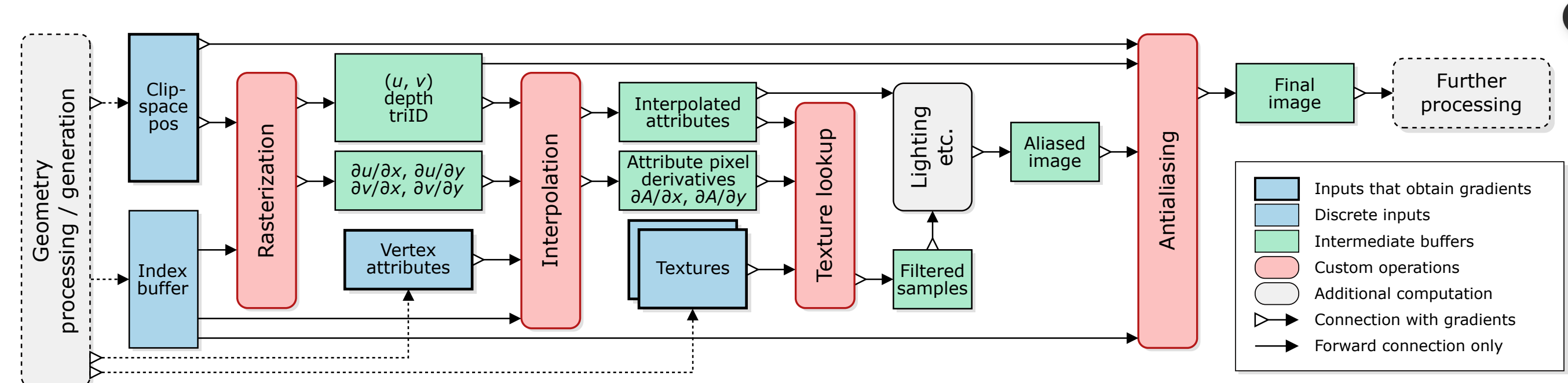
Deferred Shading
Compute derivatives in the render pipeline for backward pass
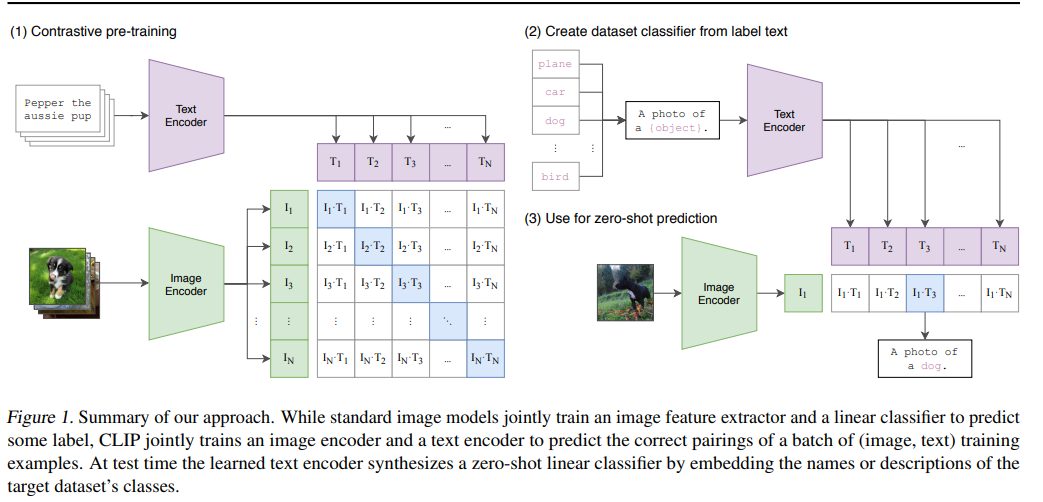
CLIP
Learning Transferable Visual Models From Natural Language Supervision
Pre-trained on large scale image-text dataset by OpenAI
View Consistency Loss
- $v$ : vertex
- $r$ : render
- $\mathcal{R}(\mathcal{M})$ : all renders of mesh $\mathcal{M}$
- $\mathcal{T}$ : transformer encoder blocks
- $P$ : non-overlapping patches
- $P\left(v, r\right)$ : nearest corresponding patch center of pixel $p\left(v, r\right)$ in $r$ that contains $v$
encourage vertices to have similar deep features across renders from different viewpoints
\[\mathcal{L}_{\mathrm{VC}}(M)= \beta \sum_{v \in \mathcal{V}} \mathcal{L}_{\mathrm{VC}}(v)\]- $\mathcal{V}$ : all vertices of mesh $\mathcal{M}$
- $\beta$ : hyperparameter
Semantic Loss
\[\mathcal{L}_{\mathcal{P}}(\Phi^{*}, \mathcal{M}, \mathcal{P})=\operatorname{sim}(\operatorname{CLIP}(\Phi^{*}(\mathcal{M})), \operatorname{CLIP}(\mathcal{P}))\]incorporating relative directions in CLIP’s embedding space can give stronger signals when the ptimization landscape between Φ∗ and P is unclear
\[\mathcal{L}_{\Delta \mathcal{P}}\left(\Phi^{*}, \mathcal{P}, \mathcal{P}_{0}\right)=\operatorname{sim}\left(\Delta \operatorname{CLIP}\left(\mathcal{P}, \mathcal{P}_{0}\right), \Delta \operatorname{CLIP}\left(\Phi^{*}(\mathcal{M}), \mathcal{M}\right)\right)\] \[\Delta \operatorname{CLIP}(\mathcal{P}, \mathcal{P}_{0})=\operatorname{CLIP}(\mathcal{P})-\operatorname{CLIP}\left(\mathcal{P}_{0}\right)\]this enhance the semantic loss by comparing the difference between the prompt and the deformed mesh with the difference between the original mesh and the deformed mesh
- $\mathcal{P}_0$ : prompt that discribes the original mesh
- $\mathcal{P}$ : prompt that discribes the deformed mesh
- $\mathcal{M}$ : original mesh
- $\Phi^*(\mathcal{M})$ : deformed mesh
- $\operatorname{CLIP}(\mathcal{P})$ : CLIP embedding of prompt $\mathcal{P}$
- $\operatorname{CLIP}(\mathcal{M})$ : CLIP embedding of image rendered by differentiable renderer from mesh $\mathcal{M}$