限制性多体模拟
介绍
考虑大部分物体都是小质量物体的情形(类似于稳定的恒星系统),在多体模拟中,可以将整个系统划分成多个引力区域,通过二体问题的求解来模拟物体运动。
二体问题是为数不多的能被求解的复杂运动,二体问题的运动微分并不复杂,即最为经典的万有引力公式,在忽略小质量物体的质量后,可以写作
\[\ddot{x}=-\frac{\mu}{\|x\|^3}x\]使用迭代计算计算此算式的计算量并不大,但迭代计算最大的问题的运动趋于发散,或是说迭代过程中物体的能量不守恒。当然这可以通过更好的迭代方法缓解。但对于二体问题,其是可以通过运动方程的求解计算其精确解。这意味这物体的运动状态可以被转化为静态参数,通过时间来确定物体的运动矢量(位移与速度)
不过通过方程求解的过程中也存在诸多问题,尤其是方程求解过程中产生分支的情形,这个项目主要是测试二体问题是否能在GPU上被高效求解,以及是否能通过插值的方式使得方程求解的性能优于迭代求解
在这个模型中,大部分物体都是小质量物体,其质量可以被忽略,
使用方程求解运动,将静态参数与运动矢量相互转换,以达到物体互动的效果
graph LR
状态矢量---方程求解-->轨道参数---时间参数
轨道参数---方程求解-->状态矢量
subgraph 轨道力学
方程求解
轨道参数
end
subgraph 迭代计算
动态受力-->状态矢量
状态矢量
碰撞检测-->状态矢量
end
项目地址:
https://github.com/StellarWarp/RestrictedGravitySimulation
———————————————————— 更新 ————————————————————
使用 Unity ECS + JobSystem 开发的 Demo
https://github.com/StellarWarp/OrbitSnadBox/releases
已知问题:Reset 会导致程序崩溃
—————————————————————————————————————————————
引力范围
为了能与不同的天体产生互动,同时仍不引入多体引力,整个引力系统被划分为多个引力范围。比如一个恒星与一个行星,物体以最小的引力范围为中心环行。
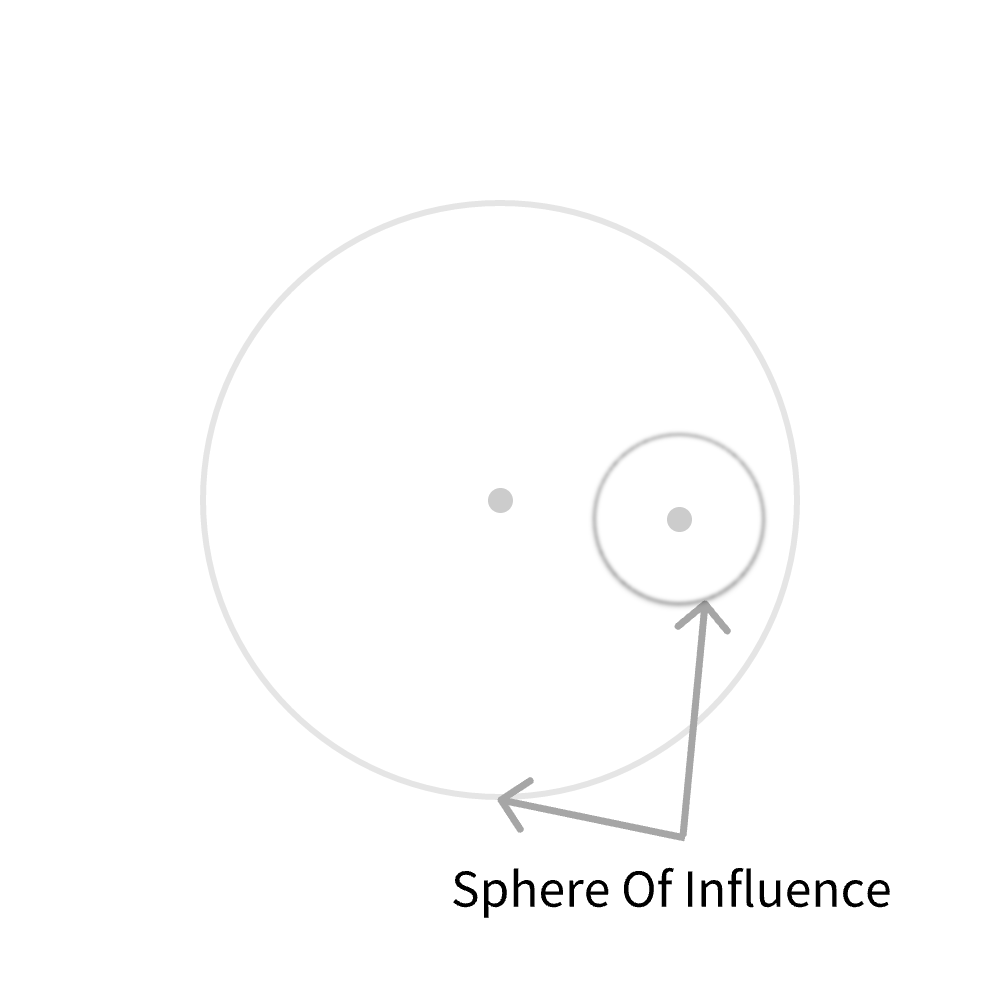
如何定义引力范围的大小?一般来说,当中心天体对物体的摄动大于其卫星时,可以认为卫星的引力已经可以被忽略
卫星轨道偏心率为0的情形下,引力范围(Sphere Of Influence)可以使用如下的公式计算
.png)
可以使用碰撞检测的方法来确定物体是否离或进入引力范围
轨道力学部分
轨道参数到状态矢量
这一部分内容讲述如何,将轨道参数转换为物体的位移与速度,即从时间参数转换为物体的位置与速度
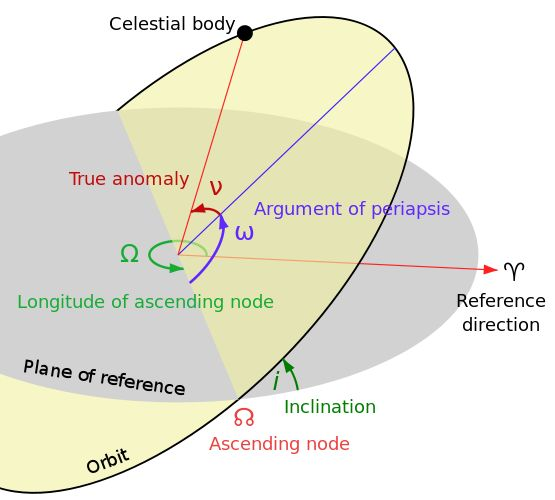
开普勒六参数
轨道参数一般使用开普勒六参数来描述,开普勒六参数包括
- $a$ 半长轴 semi-major axis
- $e$ 偏心率 eccentricity
- $i$ 仰角 inclination
- $\Omega$ 赤径 longitude of ascending node
- $\omega$ 近心点幅角 Argument of periapsis
- $\upsilon$ 真近点角 True anomaly
我们需要解决两个问题
- 将轨道参数转换为物体的位移与速度
- 将时间转化为轨道参数
给定轨道参数,求解物体的位置与速度是一个简单的几何问题
位移与速度求解
圆锥曲线方程
快速回顾一下椭圆与双曲线的几何性质
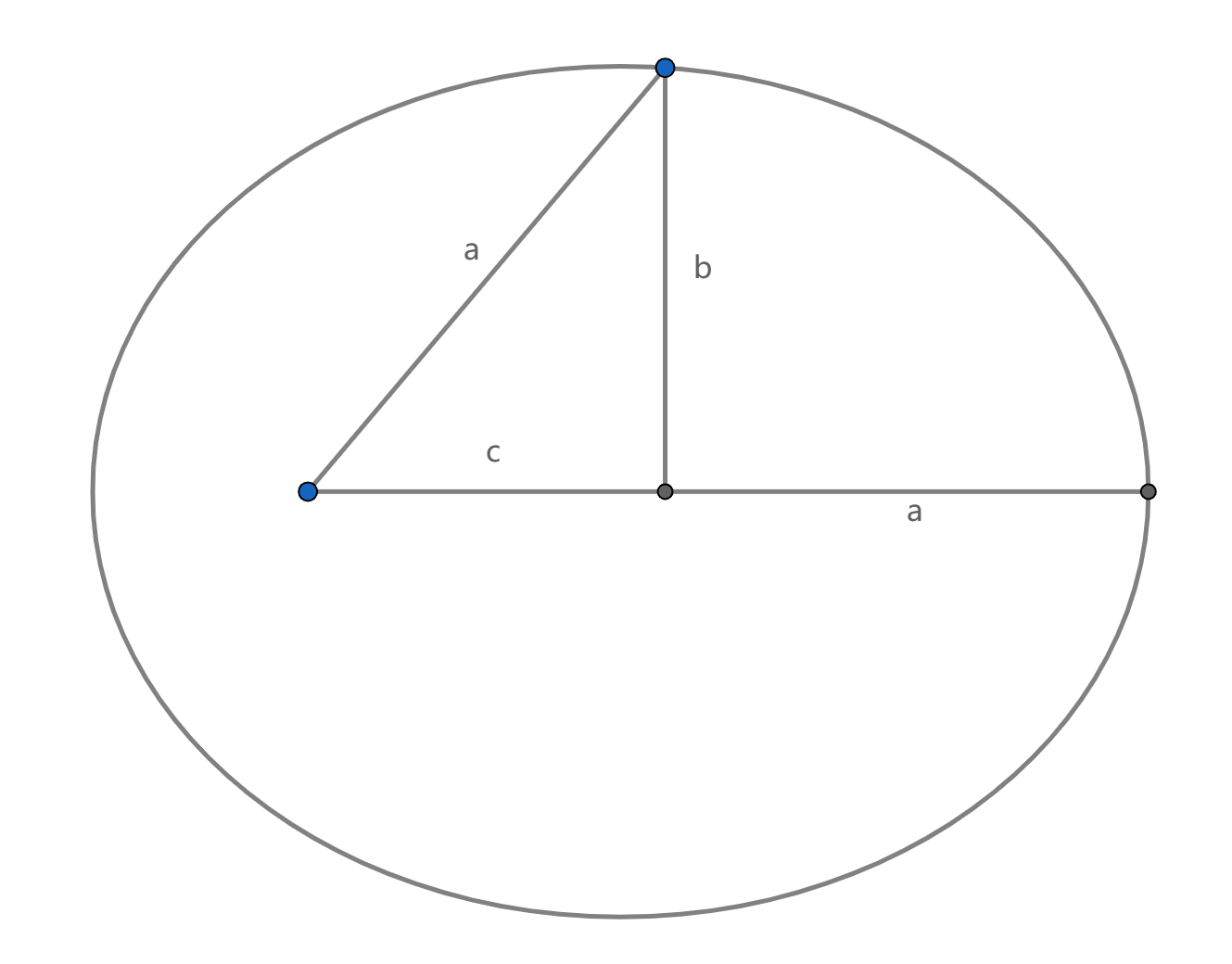
在椭圆中有
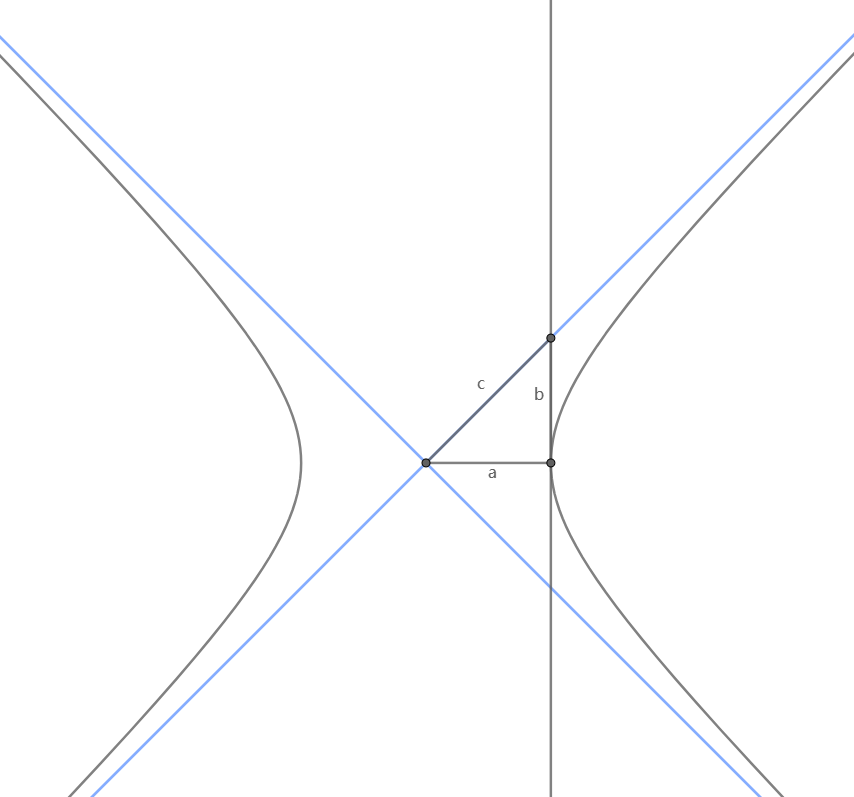
\[\begin{align*} c^2&=a^2-b^2\\ \end{align*}\]在双曲线中有
\[\begin{align*} c^2&=a^2+b^2\\ \end{align*}\]离心率的定义为
\[e=\frac{c}{a}\]圆锥曲线的统一方程为
\[r=\frac{p}{1+e\cos \theta}\]其中
\[\begin{align*} p&=a(1-e^2)\\ \end{align*}\]这个方程可以表示圆、椭圆、双曲线、抛物线,虽然其在数学上有很好的一致性,但是在计算上会出现一些问题,当$e=1$时,分母为0,无法计算
这里不采用圆锥曲线的统一方程,因为在偏心率趋近于1时(低速状态下)会导致数值发散
参数方程
对于椭圆、圆形轨道,可以使用参数方程来表示
\[\begin{cases} x=a\cos E\\ y=b\sin E \end{cases}\]$E$ 被称为偏近心点角 Eccentric anomaly
对于双曲线轨道,这里需要引入双曲函数
\[\begin{align*} \cosh \theta = \frac{e+\cos \theta}{1+e\cos \theta}\\ \sinh \theta = \frac{\sqrt{e^2-1}\sin \theta}{1+e\cos \theta} \end{align*}\]双曲线的参数方程为
\[\begin{cases} x=a\cosh H\\ y=b\sinh H \end{cases}\]$H$ 被称为双曲近心点角 Hyperbolic anomaly
从参数方程求解物体与焦点的距离 $r$
由圆锥曲线的定义可知
\[r = \frac{a(1-e^2)}{1+e\cos \upsilon}\]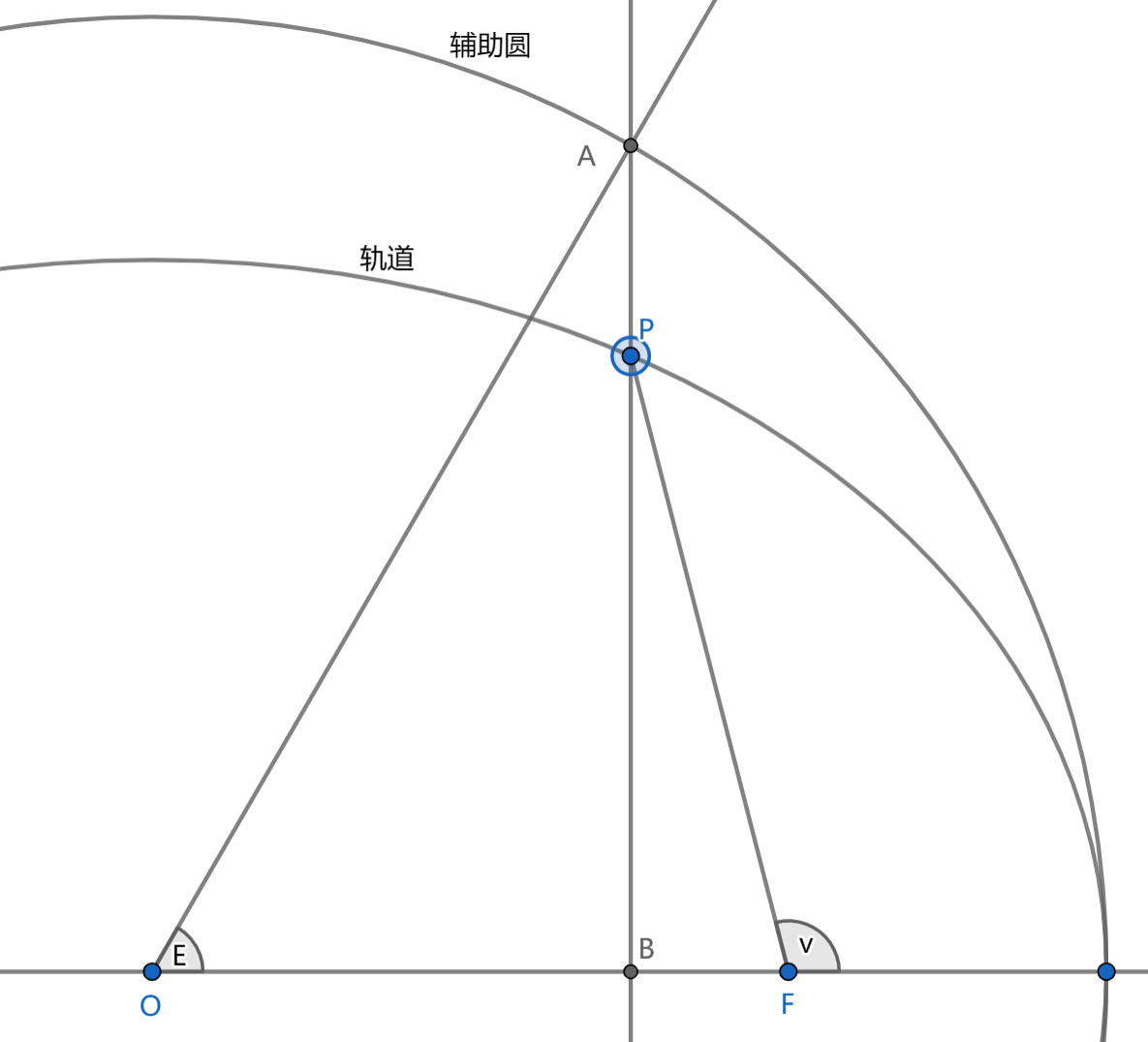
现在将 $E$ 转化为 $\upsilon$
\[\begin{align*} |OA| &= a\\ |OB| &= a\cos E\\ |AB| &= a\sin E\\ |OF| &= c\\ |BF| &= c - a\cos E\\ |BP| &= b\sin E\\ |PF| &= \sqrt{|BF|^2+|BP|^2} = \sqrt{(c-a\cos E)^2+b^2\sin^2 E}\\ \cos \upsilon &= \frac{-|BF|}{ |PF| } \\ &= \frac{a\cos E-c}{\sqrt{(c-a\cos E)^2+b^2\sin^2 E}}\\ &= \frac{a(\cos E-e)}{a\sqrt{(e-\cos E)^2+b^2/a^2\sin^2 E}}\\ &= \frac{\cos E - e}{\sqrt{(e-\cos E)^2+b^2/a^2\sin^2 E}}\\ &(e-\cos E)^2+b^2/a^2\sin^2 E\\ &= (e-\cos E)^2+(1-e^2)(1-\cos^2 E)\\ &= e^2-2e\cos E+\cos^2 E+(1-e^2)-(1-e^2)\cos^2 E\\ &= e^2-e^2+1+\cos^2 E-\cos^2 E+e^2\cos^2 E\\ &= (1-e\cos E)^2\\ \cos \upsilon &= \frac{\cos E - e}{1-e\cos E}\\ \end{align*}\]带入
\[r = \frac{a(1-e^2)}{1+e\cos \upsilon}\]有
\[r=a(1-e\cos E)\]通过类似的推导过程可以得到,双曲线中的 $H$ 与 $\upsilon$ 的关系为
\[\cos \upsilon = \frac{\cosh H - e}{1-e\cosh H}\]带入 $r$ 的表达式有
\[r=a(1-e\cosh H)\]椭圆轨道
平面位移
\[\begin{align*} \vec{X}=\begin{bmatrix} a\cos E -c\\ b\sin E\\ 0 \end{bmatrix} \end{align*}\]平面速度
在前得到的距离公式为 $r=a(1-e\cos E)$
轨道速度公式为
\[v=\sqrt{MG(\frac{2}{r}-\frac{1}{a})}\]速度向量
\[\begin{align*} \vec{v}_d &= \begin{bmatrix}-a\sin E\\b\cos E\\0\end{bmatrix}\\ \vec{V} &= \frac{\vec{v}_d}{\lVert \vec{v}_d \rVert}\cdot v \end{align*}\]双曲轨道
为区分两种轨道、减少分支,双曲轨道的半长轴为负数即 $a<0$
平面位移
\[\begin{align*} \vec{X}=\begin{bmatrix} a\cosh H -c\\ -b\sin E\\ 0 \end{bmatrix} \end{align*}\]平面速度
在前得到的距离公式为 $r=a(1-e\cosh H)$
轨道速度公式为
\[v=\sqrt{MG(\frac{2}{r}-\frac{1}{a})}\]速度向量
\[\begin{align*} \vec{v}_d &= \begin{bmatrix}a\sinh H\\-b\cosh H\\0\end{bmatrix}\\ \vec{V} &= \frac{\vec{v}_d}{\lVert \vec{v}_d \rVert}\cdot v \end{align*}\]平面到空间的转化
$R$ 是 仰角 $i$ 赤径 $\Omega$ 近心点幅角 $\omega$ 的复合旋转矩阵
\[\begin{align*} \vec{X_w} &= R\cdot\vec{X}\\ \vec{V_w} &= R\cdot\vec{V}\\ \end{align*}\]其中旋转的计算方法
1
R = ti.math.rotation3d(0.0, 0.0, W)@ti.math.rotation3d(i, 0.0, 0.0)@ti.math.rotation3d(0.0, 0.0, w)
开普勒方程
我们已经知道了如何将轨道参数角转化为空间位置、速度,但是我们需要的是时间与空间位置、速度的关系,所以我们需要将时间转化为轨道参数角。而唯一与时间相关的轨道参数是真近点角 $\upsilon$ 在前我们将 $\upsilon$ 转化为了偏近点角 $E$ 或 $H$
定义平近角 $M$ 为
\[M=n*\tau\]$n$ 是平均角速度、$\tau$ 是固有时间
开普勒给出了平近角与偏近点角的关系,这称为 开普勒方程(Kepler’s equation)
\[M=E-e \sin E\\\]对于双曲轨道
\[M=e \sinh H-H\\\]计算的流程
至此我们可以给出计算的流程
graph LR
t-.t-t0.->τ-.M=n*τ.->M-.Kepler Equation.->E
M-.Kepler Equation.->H
E-->X
E-->V
H-->X
H-->V
开普勒方程的求解
对于椭圆轨道下的开普勒方程 \(M=E-e \sin E\\\) 这里参考美国海军天文台 Marc A. Murison A Practical Method for Solving the Kepler Equation
使用三阶迭代方程计算椭圆轨道的开普勒方程
推导过程
将其写成方程形式,当$x=0$时即 $x=E$
\[f(x)=x−esinx−M\]误差值$ε≡x−E$则有 $E=x-\epsilon$
泰勒展开
\[f(E)=f(x−ε)=x−esinx−M−(1 −ecosx)ε+\frac{1}{2}ε^2esinx−\frac{1}{6}ε^3ecosx+...\]取一阶项 $0=x−esinx−M−(1 −ecosx)ε$有
\[\varepsilon=\frac{x-e \sin x-M}{1-e \cos x}\]误差值写成迭代式
\[\varepsilon_{n+1}=\frac{x_{n}-e \sin x_{n}-M}{1-e \cos x_{n}}\]二阶项 $x−esinx−M−(1 −ecosx)ε+\frac{1}{2}ε^2esinx$
\[\begin{align*} \varepsilon=\frac{x-e \sin x-M}{1-e \cos x-\frac{1}{2} \varepsilon e \sin x}\\ \varepsilon_{n+1}=\frac{x_{n}-e \sin x_{n}-M}{1-e \cos x_{n}-\frac{1}{2} \varepsilon_{n} e \sin x_{n}}\\ \end{align*}\]将一阶误差值带入
\[\varepsilon_{n+1}=\frac{x_{n}-e \sin x_{n}-M}{1-e \cos x_{n}-\frac{1}{2} e \sin x_{n} \frac{x_{n}-e \sin x_{n}-M}{1-e \cos x_{n}}}\]三阶项$x−esinx−M−(1 −ecosx)ε+\frac{1}{2}ε^2esinx−\frac{1}{6}ε^3ecosx$转换带入二阶误差值迭代式,最终有
\[\varepsilon_{n+1}=\frac{x_{n}-e \sin x_{n}-M}{1-e \cos x_{n}-\frac{1}{2}\left(e \sin x_{n}-\frac{1}{3} e \cos x_{n} \cdot \varepsilon_{n}\right) \varepsilon_{n}}\]初始值的设置
\[E_{k}=M+e \sin E_{k-1}\]三阶迭代后,初始值已经与收敛值接近,初始迭代值 $E_0=M$
\[E=M+e \sin M+e^{2} \sin M \cos M+\frac{1}{2} e^{3} \sin M\left(3 \cos ^{2} M-1\right)\]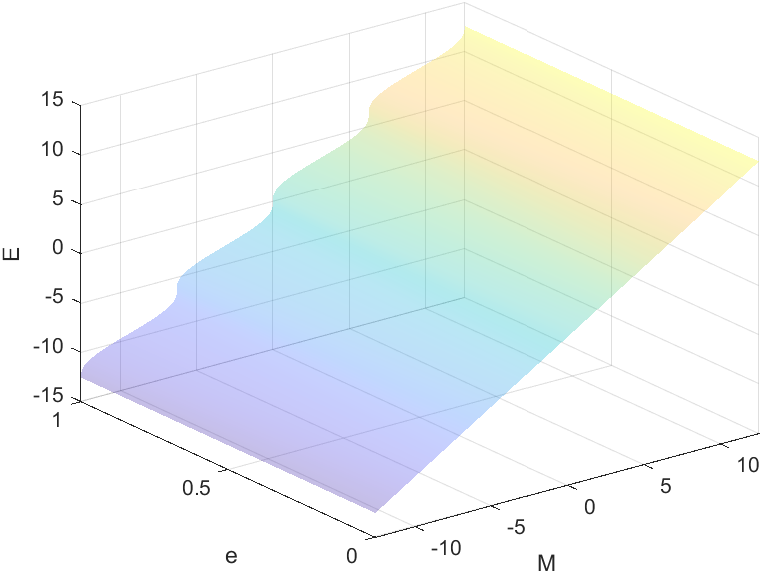
下图展示了初始值与收敛值的误差
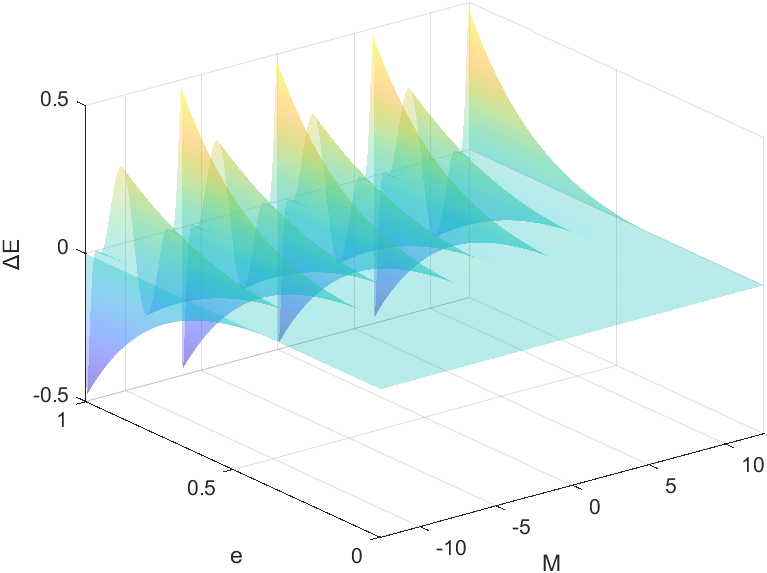
当离心率接近于1时会有较大的误差
总结上述的方法
\[\begin{align*} \epsilon_1 &= \frac{f^{(0)}}{f^{(1)}}\\ \epsilon_2 &= \frac{ f^{(0)} }{ f^{(1)}-\epsilon_1\frac{f^{(2)}}{2} }\\ \epsilon_3 &= \frac{ f^{(0)} }{ f^{(1)}-\frac{f^{(2)}-\epsilon_2\frac{f^{(3)}}{3}}{2} }\\ f^{(0)} &= f(x)\\ \end{align*}\]写成递归形式
\[\begin{align*} \epsilon_1 &= \frac{f^{(0)}}{f^{(1)}}\\ f^{(n)}&=f^{(n)}-\epsilon_n\frac{f^{(n+1)}}{n+1}\\ \end{align*}\]双曲轨道的开普勒方程
\[M=e \sinh H-H\]双曲角 $H=iE$ 且有 $\sinh(ix)=-i\sin(x)$
\[M=i e \sin E-i E=-i(E-e \sin E)\]双曲轨道与椭圆轨道的开普勒函数在某种意义上来说是统一的,但是这里还是单独计算双曲轨道的开普勒方程
将其写成方程
\[f(x)=e \sinh x-x-M\]求导展开带入上述方法即可得到解
初值
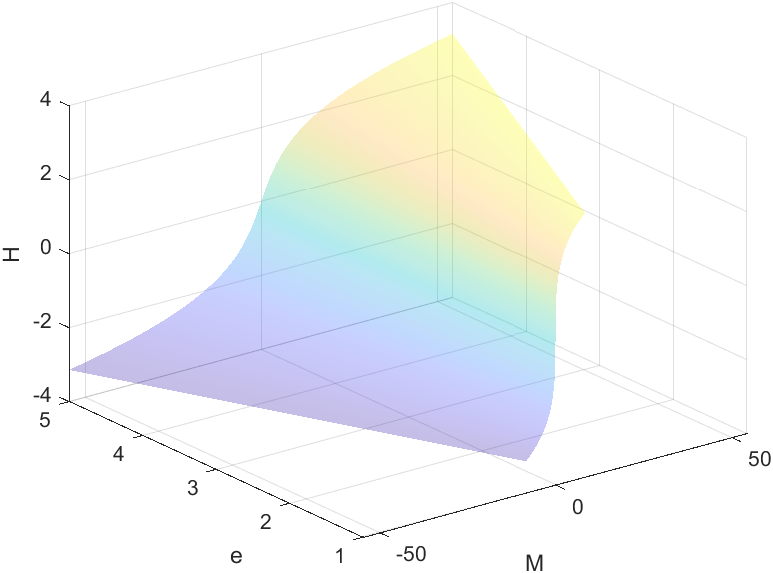
但是很遗憾的是迭代的初值方法对于双曲轨道并不适用,其会导致数值发散,所以,这里采用了比较简陋的方法,采用$\arcsin(M)$作为迭代初值
下图为基准值
下图为初始值的差值
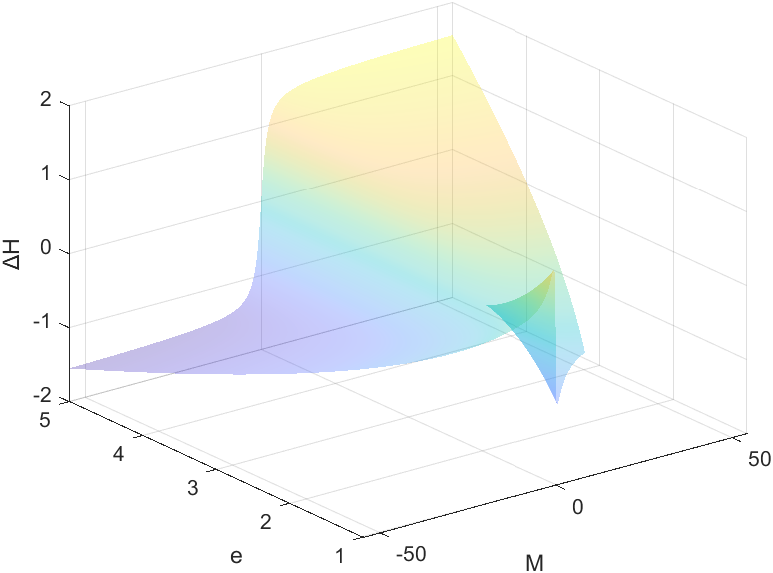
此方法并没有进行验证,双曲线下的迭代次数不一定为最优
确定初值:查表法
进行预计算,将计算结果提前储存在一张贴图中,后续通过查表插值来得到较为接近的初值
对于椭圆轨道,可以进行周期映射,将$E$的范围映射到$[-\pi,\pi)$的区间内进行插值
对于双曲轨道,$M$ 与 $e$ 均不存在周期,且可以延伸到无限远处,考虑将 $e\in(1,+\inf) \rightarrow \frac{1}{e}\in(0,1)$,对H的计算范围加以限制,超出范围的M值取$\arcsin(M)$
并且考虑到开普勒方程的对称性,预计算结果中只需要存储$M>0$或者$M<0$的结果
状态矢量到轨道参数
这里的的公式推导涉及定积分初值的确定,内容已经有点多了,这里直接给出最终的计算方法
\[\begin{align*} \mu &=MG\\ Ws &=\frac{\vec{V}^2 }{2}-\frac{\mu}{\left | \vec{X} \right | } \\ a &=-\frac{\mu}{2W_s} \\ \vec{L} &=\vec{X}\times \vec{V} \\ p&=\frac{\vec{L}^2 }{\mu} \\ e&=\sqrt[]{1-\frac{p }{a} } \end{align*}\]偏近点角与平近角
对于椭圆轨道
\[\begin{align*} \cos E &= 1-\frac{r}{a}\\ \sin E &=\frac{\vec{X}\cdot \vec{V} }{\sqrt[]{a\mu } }\\ M &= E-e\sin E \end{align*}\]对于双曲轨道
\[\begin{align*} \cosh H &= \frac{1+\frac{r}{a} }{e}\\ \sinh H &= \frac{\vec{X}\cdot \vec{V} }{e\sqrt[]{-a\mu } }\\ M &= e\sinh H-H \end{align*}\]仰角
\[\begin{align*} \sin i&=\frac{\left | \vec{L_{xy}} \right | }{\left | \vec{L_{}} \right |}\\ \cos i&=\frac{L_z}{\left | \vec{L} \right | } \end{align*}\]真近点角(如果需要)
\[\begin{align*} \tan \theta &=\frac{\sqrt[]{1-e^2 }\sin E}{\cos E-e} \\ \tan \theta &=-\frac{\sqrt[]{e^2-1 }\sinh H}{\cosh H-e} \end{align*}\]关系图
正向
graph LR
t-.t-t0.->τ-.M=n*τ.->M-.Kepler Equation.->E & H
E & H-->r & X & V
从M转换到E或H需要求解开普勒方程,开销高。但是逆向求解的开销并不高
逆向
graph LR
r & X & V-->1[E or H]-->M-->τ-->t
优化
轨道计算分离
考虑到性能与精度问题,双曲轨道与椭圆轨道所采用计算方式并不统一,为避免在GPU上的分支开销。需要将椭圆轨道的物体与双曲轨道的物体分离计算。
而椭圆轨道与双曲轨道会在某些情况下发生变化,需要考虑两种轨道的转换问题。
项目里采用的方法是将存储物体参数的field分区,因为虽然两种轨道可能互相转换,只要不增加或减少,物体的总数不变

可以采取交换与调整边界的方式将两边的转化参数的类型
运动插值
通过方程求解状态矢量的计算量较大,但是求解的结果稳定,考虑采用插值的方法来减少计算量
将所有物体的方程求解分布在多帧中,使用插值的方法获取当前帧的位置